Motor Editor
Motor Editor は、装置のモーター軸を定義し、リストとして管理するエディタです。軸の追加・削除、名前と ボードマッピングの指定を行い、エンコーダ・方向・パルス出力などの軸パラメータを行単位で編集します。進入 経路は Project → Motor Editor (Ctrl+Shift+3) です。
画面上部には MOTOR LIST ラベルとともに軸リストの DataGrid があり、下部には保存ボタンがあります。
グリッドの各行が 1 つの軸であり、ここで定義した軸はスクリプトやテスト画面から名前で参照されます。
本章は「軸を定義してリストを管理する」観点で扱います。同じグリッド表面を共有する Motor Param は、System メニューから「すでに定義された軸のパラメータをチューニング する」観点で記述するため、詳細なパラメータ値の調整はそちらも併せて参照してください。
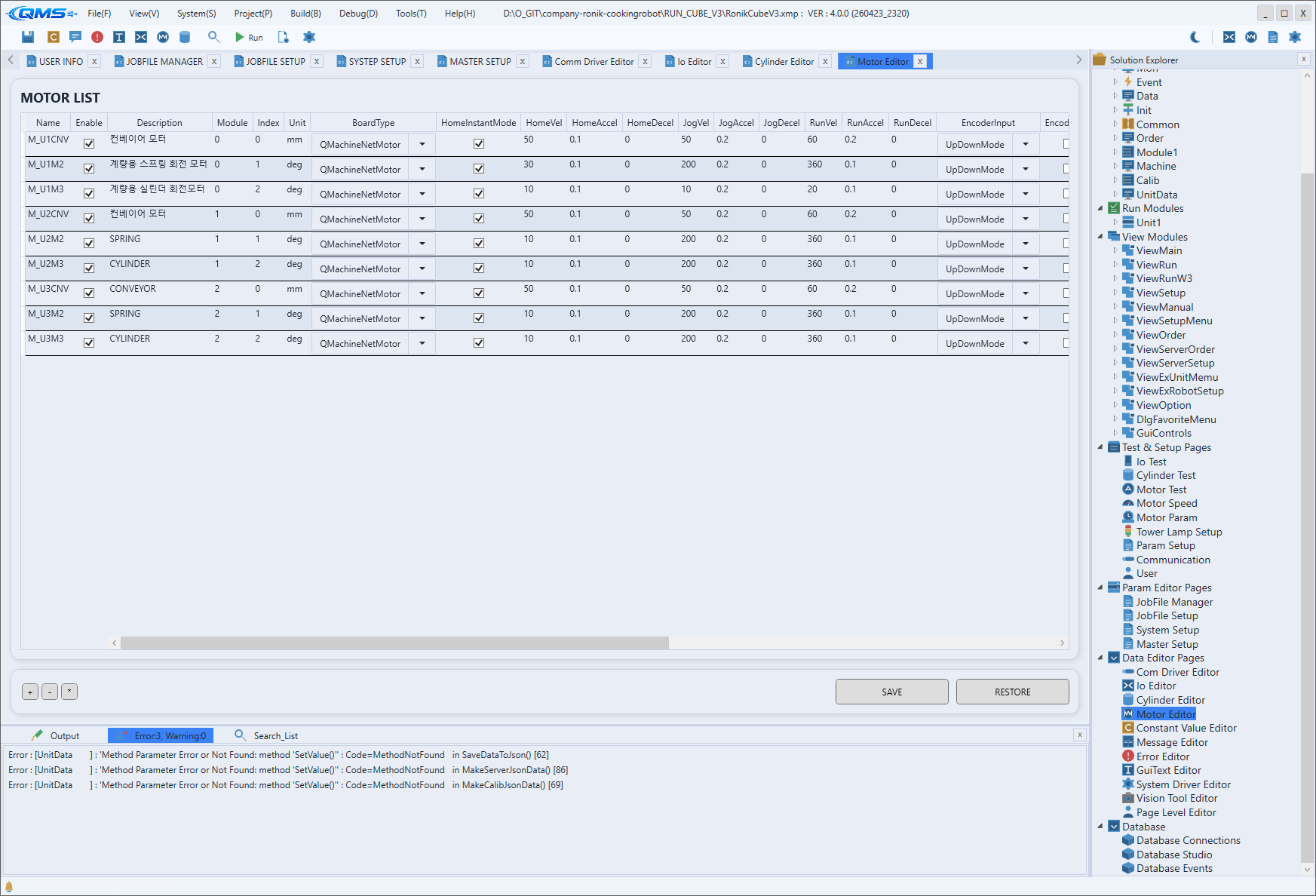
基本識別列
各行が 1 つのモーター軸です。軸を識別してボードに接続する基本列は次のとおりです。
| 列 | 説明 |
|---|---|
Name | 軸名です。スクリプトから MOTOR["名前"] で参照します。 |
Enable | 該当軸を使用するかを指定するチェックボックスです。 |
Description | 軸の用途に関する説明です。 |
BoardType | 軸が接続されるボード種別を選択する列です。 |
Module | 軸が属するモジュールです。 |
Index | モジュール内の軸番号です。 |
Unit | 位置・速度の表記に使う単位です。 |
SubModel | 機種分岐時に使うサブモデル識別子です。 |
主な Enum 列
軸の信号方式と出力形態を決める列挙(Enum)列です。定義した値によりモーター制御の基本動作が変わるため、 ボード・ドライバの仕様に合わせて選択します。
| 列 | Enum | 説明 |
|---|---|---|
EncoderInput | EncoderInput | エンコーダ入力方式を選択します。 |
Orientation | MotorOrientation | 軸の方向(回転・移動の基準)を指定します。 |
PulseOut | PulseOut | パルス出力方式を選択します。 |
このほか EncoderUse・EncoderInverse・HomeInstantMode などの動作オプションチェックボックスと、
HomeVel・JogVel・RunVel などの速度・加減速関連列が併せて提供されます。速度セットの観点の設定は
Motor Speed で別途扱います。
行の編集
グリッドで右クリックすると、軸リストを管理するコンテキストメニューが表示されます。軸の追加・複製・移動・ 削除、列の一括適用が可能です。
| メニュー項目 | 動作 |
|---|---|
Add Row | 新しいモーター軸の行を追加します。 |
Duplicate Row | 選択した行を複製します。 |
Move Up · Move Down | 選択した行を上・下に移動します。 |
Set All This Column | 選択した列の値を全行に一括適用します。 |
Delete Row | 選択した行を削除します。 |
下部の SAVE で編集内容を保存し、RESTORE で直前の保存値に戻します。グリッド左下の +・-・* ボタンで
表示倍率を調整できます。
操作の流れ
- Project → Motor Editor (Ctrl+Shift+3) でエディタを開きます。
- コンテキストメニューの
Add Rowで軸行を追加し、Name・Descriptionを入力します。 BoardType・Module・Indexで軸を実際のボードにマッピングします。EncoderInput・Orientation・PulseOutなどの Enum 列をボード仕様に合わせて選択します。- 下部の
SAVEで保存します。詳細なパラメータチューニングは Motor Param で続けます。 - 定義した軸は Motor Test で動作を検証し、速度セットは Motor Speed で設定します。