Motor Param
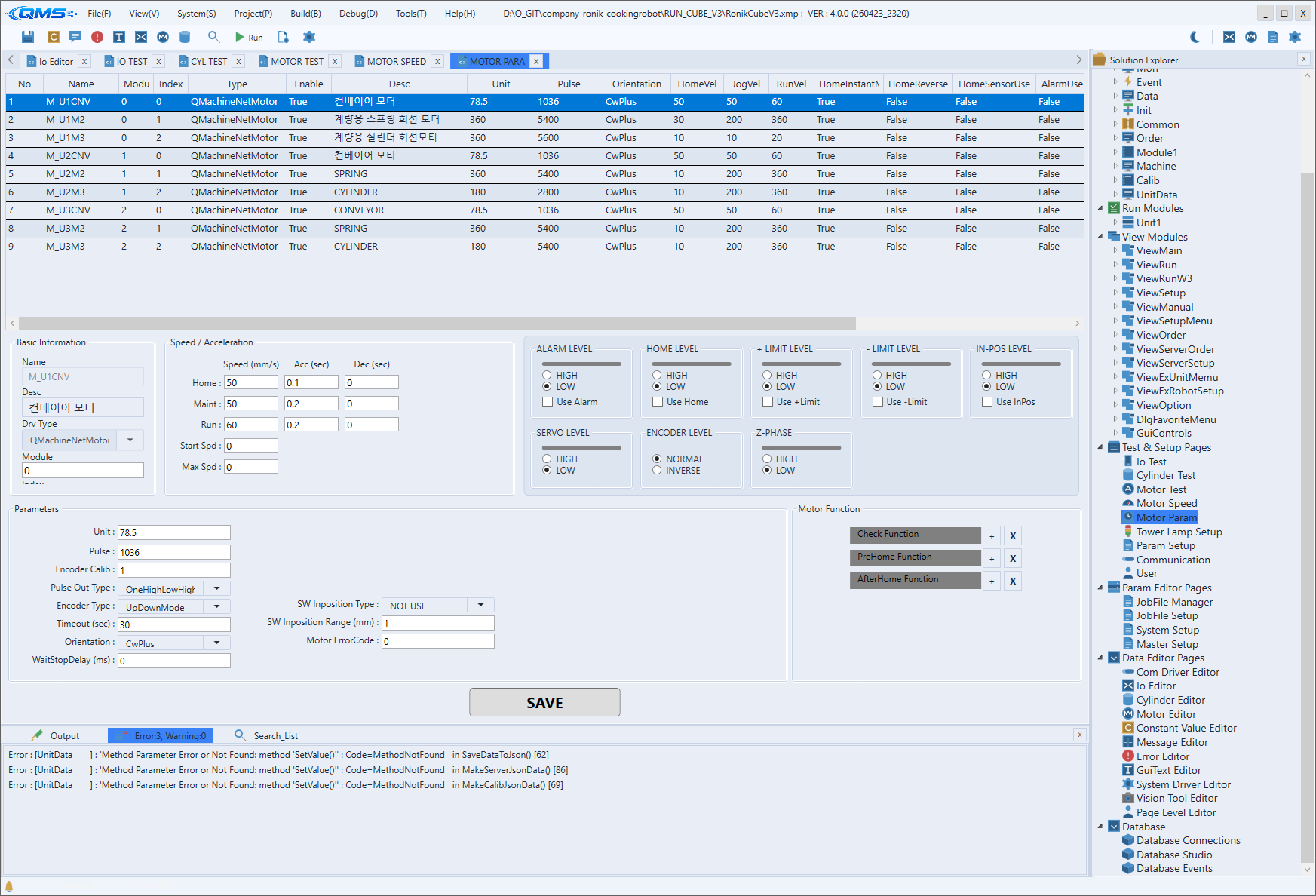
Motor Param は、モーター軸ごとの動作パラメータを 1 行ずつ整理してチューニング値を設定する画面です。 画面上部の MOTOR LIST グリッドに軸が行として並び、原点復帰・ジョグ・運転速度、センサーレベル、 エンコーダ、パルス出力方式など、その軸が実際にどう振る舞うかを決める値を入力します。進入経路は System → Motor Param です。
本画面は、モーター軸を定義する Motor Editor と同じエディタ面を共有します。 ただし進入の視点が異なります。System → Motor Param は、すでに定義された軸に対して運用現場で パラメータのチューニング値を調整する視点であり、Project → Motor Editor はプロジェクト設計段階で 軸そのものを新規に定義する視点です。
主な領域
画面は上部のパラメータグリッドと下部のボタン領域で構成されます。
| 領域 | 説明 |
|---|---|
| MOTOR LIST | 軸を行として並べる DataGrid。左端の Name・Enable の 2 列は固定され、横スクロール時も残ります。 |
| パラメータ列 | 各軸の動作値を保持する多数の列。数値セルは直接入力し、一部の列はチェックボックスやドロップダウンで選びます。 |
| 倍率ボタン | グリッド左下の +・-・* ボタンで表示文字の倍率を拡大・縮小し、元の倍率に戻します。 |
| SAVE / RESTORE | 右下のボタン。SAVE で入力値を保存し、RESTORE で直前の保存値に戻します。 |
Enum ドロップダウン列
値が決まったリストから選ばれる列はドロップダウンで表示されます。セルを開くと選択肢が現れ、不正な値は 入力できません。
| 列 | 意味 |
|---|---|
EncoderInput | エンコーダ入力方式を選択します。 |
Orientation | モーターの取り付け・駆動方向(MotorOrientation)を選択します。 |
PulseOut | パルス出力方式を選択します。 |
センサー・信号レベル列(PLimitSensorLevel、NLimitSensorLevel、HomeSensorLevel、AlarmLevel、
ServoOnLevel など)もドロップダウンで接点レベルを選びます。
主な数値・チェック列
代表的なパラメータ列は次のとおりです。動作段階ごとの速度値はここでも入力できますが、名前を付けた 速度セットの管理は Motor Speed で扱います。
| 列 | 意味 |
|---|---|
HomeVel · HomeAccel · HomeDecel | 原点復帰の速度 / 加速 / 減速 |
JogVel · JogAccel · JogDecel | ジョグの速度 / 加速 / 減速 |
RunVel · RunAccel · RunDecel | 運転の速度 / 加速 / 減速 |
Unit(UnitPerPulse) · Pulse | パルスあたりの移動単位とパルス数(機構換算) |
MinPos · MaxPos | ソフトウェア移動限界 |
TimeOut · HomeTimeOut | 一般・原点復帰のタイムアウト |
EncoderUse · InpositionUse · AlarmUse | 機能の有効/無効チェックボックス |
行の編集
グリッドを右クリックするとコンテキストメニューで行を編集できます。Add Row で行を追加し、
Duplicate Row で選択行を複製、Move Up・Move Down で順序を入れ替えます。
Set All This Column は選択セルの値を同じ列全体に一括適用し、Delete Row で行を削除します。
操作の流れ
- System → Motor Param で画面を開きます。
- MOTOR LIST でチューニングする軸の行を探します。
- 速度・加減速・センサーレベル・エンコーダ・パルス出力など、必要なセルを入力または選択します。
- 同じ値を複数の軸に適用するには、セルを選択して右クリックし
Set All This Columnを使います。 - 下部の
SAVEで保存します。入力を誤った場合はRESTOREで直前の値に戻します。