Motor Param
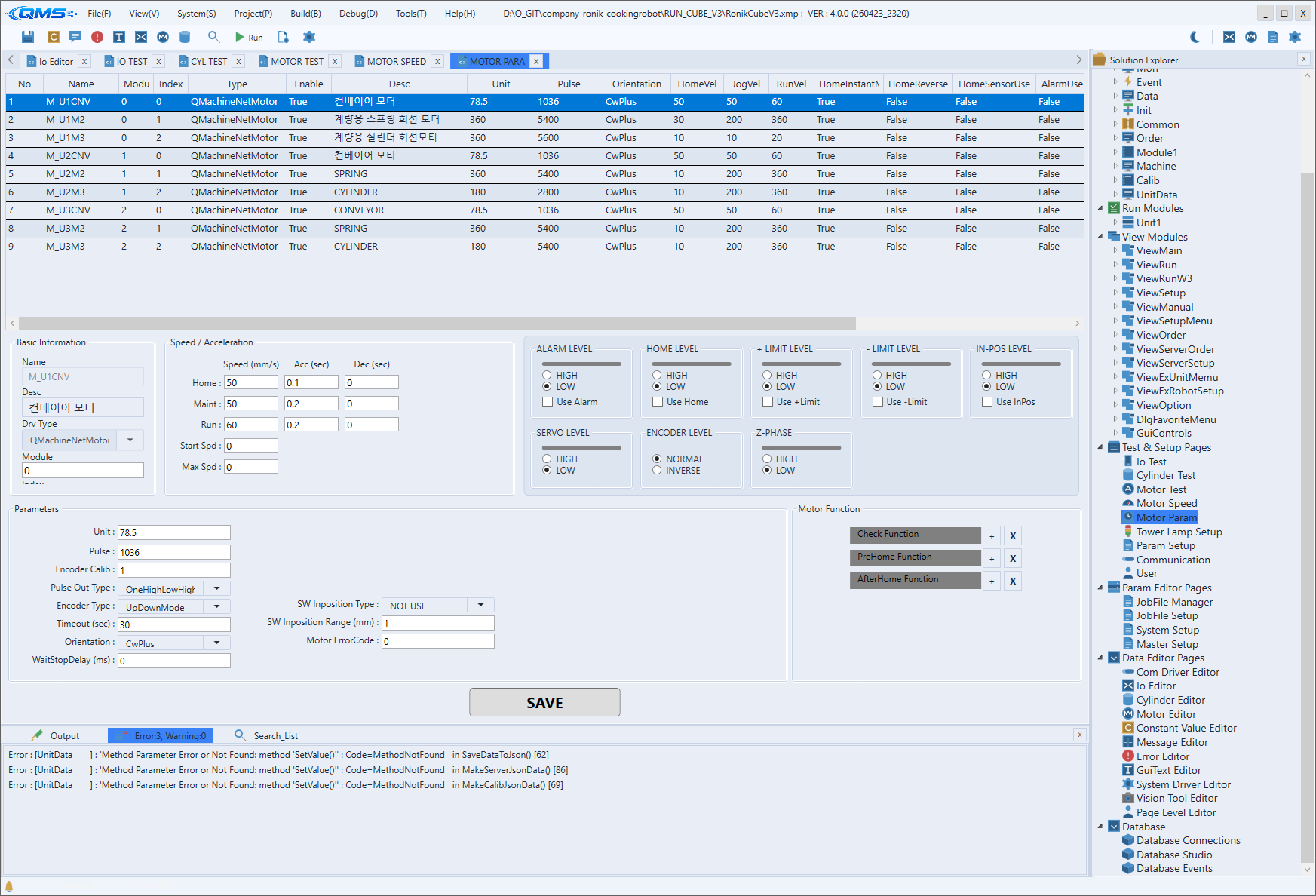
Motor Param 은 모터 축별 동작 파라미터를 한 행씩 정리해 튜닝 값을 설정하는 화면입니다. 화면 상단의 MOTOR LIST 그리드에 축이 행으로 나열되며, 원점복귀·조그·운전 속도, 센서 레벨, 엔코더, 펄스 출력 방식 등 축이 실제로 어떻게 거동할지를 결정하는 값을 입력합니다. 진입 경로는 System → Motor Param 입니다.
이 화면은 모터 축을 정의하는 Motor Editor 와 동일한 에디터 표면을 공유합니다. 다만 진입 관점이 다릅니다. System → Motor Param 은 이미 정의된 축에 대해 운영 현장에서 파라미터 튜닝 값을 조정하는 관점이고, Project → Motor Editor 는 프로젝트 설계 단계에서 축 자체를 새로 정의하는 관점입니다.
주요 영역
화면은 상단 파라미터 그리드와 하단 버튼 영역으로 구성됩니다.
| 영역 | 설명 |
|---|---|
| MOTOR LIST | 축을 행으로 나열하는 DataGrid 입니다. 좌측 Name·Enable 두 컬럼은 고정되어 가로 스크롤 시에도 남습니다. |
| 파라미터 컬럼 | 각 축의 동작 값을 담는 다수의 컬럼입니다. 숫자 셀은 직접 입력하고, 일부 컬럼은 체크박스 또는 드롭다운으로 값을 고릅니다. |
| 배율 버튼 | 그리드 좌하단의 +·-·* 버튼으로 표시 글자 배율을 키우거나 줄이고, 원래 배율로 되돌립니다. |
| SAVE / RESTORE | 우하단 버튼입니다. SAVE 로 입력값을 저장하고, RESTORE 로 직전 저장값으로 되돌립니다. |
Enum 드롭다운 컬럼
값이 정해진 목록에서 선택되는 컬럼은 드롭다운으로 표시됩니다. 셀을 열면 선택지가 나타나며, 잘못된 값을 입력할 수 없습니다.
| 컬럼 | 의미 |
|---|---|
EncoderInput | 엔코더 입력 방식을 선택합니다. |
Orientation | 모터의 설치·구동 방향(MotorOrientation)을 선택합니다. |
PulseOut | 펄스 출력 방식을 선택합니다. |
센서·신호 레벨 컬럼(PLimitSensorLevel, NLimitSensorLevel, HomeSensorLevel, AlarmLevel,
ServoOnLevel 등)도 드롭다운으로 접점 레벨을 고릅니다.
주요 숫자·체크 컬럼
대표적인 파라미터 컬럼은 다음과 같습니다. 동작 단계별 속도값은 여기서도 입력할 수 있으나, 이름을 붙인 속도 세트 관리는 Motor Speed 에서 다룹니다.
| 컬럼 | 의미 |
|---|---|
HomeVel · HomeAccel · HomeDecel | 원점복귀 속도·가속·감속 |
JogVel · JogAccel · JogDecel | 조그 속도·가속·감속 |
RunVel · RunAccel · RunDecel | 운전 속도·가속·감속 |
Unit(UnitPerPulse) · Pulse | 펄스당 이동 단위와 펄스 수 (기구 환산) |
MinPos · MaxPos | 소프트웨어 이동 한계 |
TimeOut · HomeTimeOut | 일반·원점복귀 타임아웃 |
EncoderUse · InpositionUse · AlarmUse | 기능 사용 여부 체크박스 |
행 편집
그리드에서 우클릭하면 컨텍스트 메뉴로 행을 편집할 수 있습니다. Add Row 로 행을 추가하고,
Duplicate Row 로 선택 행을 복제하며, Move Up·Move Down 으로 순서를 바꿉니다.
Set All This Column 은 선택한 셀의 값을 같은 컬럼 전체에 일괄 적용하고, Delete Row 로 행을 삭제합니다.
사용 흐름
- System → Motor Param 으로 화면을 엽니다.
- MOTOR LIST 에서 튜닝할 축의 행을 찾습니다.
- 속도·가감속·센서 레벨·엔코더·펄스 출력 등 필요한 셀을 입력하거나 드롭다운에서 선택합니다.
- 같은 값을 여러 축에 적용하려면 셀을 선택하고 우클릭 후
Set All This Column을 사용합니다. - 하단
SAVE로 저장합니다. 잘못 입력한 경우RESTORE로 직전 값으로 되돌립니다.