GUI 매뉴얼 · Chapter 20
Motor Test
Motor Test 는 모터 축의 JOG·이동·원점복귀를 직접 테스트하는 화면입니다. 축을 미동(JOG)시키고 절대/상대 위치로 이동시키며, 원점복귀(Home)와 서보 ON/OFF 를 수행하여 모터 배선과 동작 방향, 위치 정밀도를 확인할 때 사용합니다. 진입 경로는 System → Motor Test (Ctrl+3) 입니다.
좌측 목록에서 축을 선택하면 우측 패널에 해당 축의 현재 위치와 신호 상태가 표시되고, 조작 패널로 이동을 지시할 수 있습니다. 속도 프로파일은 Motor Speed 에서, 축 파라미터는 Motor Param 과 Motor Editor 에서 다룹니다.
JOG·이동·원점복귀 버튼을 누르면 축이 실제로 움직입니다. 실 장비가 연결된 상태에서 동작하므로 축 이동 경로상의 안전을 확인하고, 필요 시
STOP·EMG STOP버튼으로 즉시 정지할 수 있도록 대비한 뒤 조작하시기 바랍니다.
주요 영역
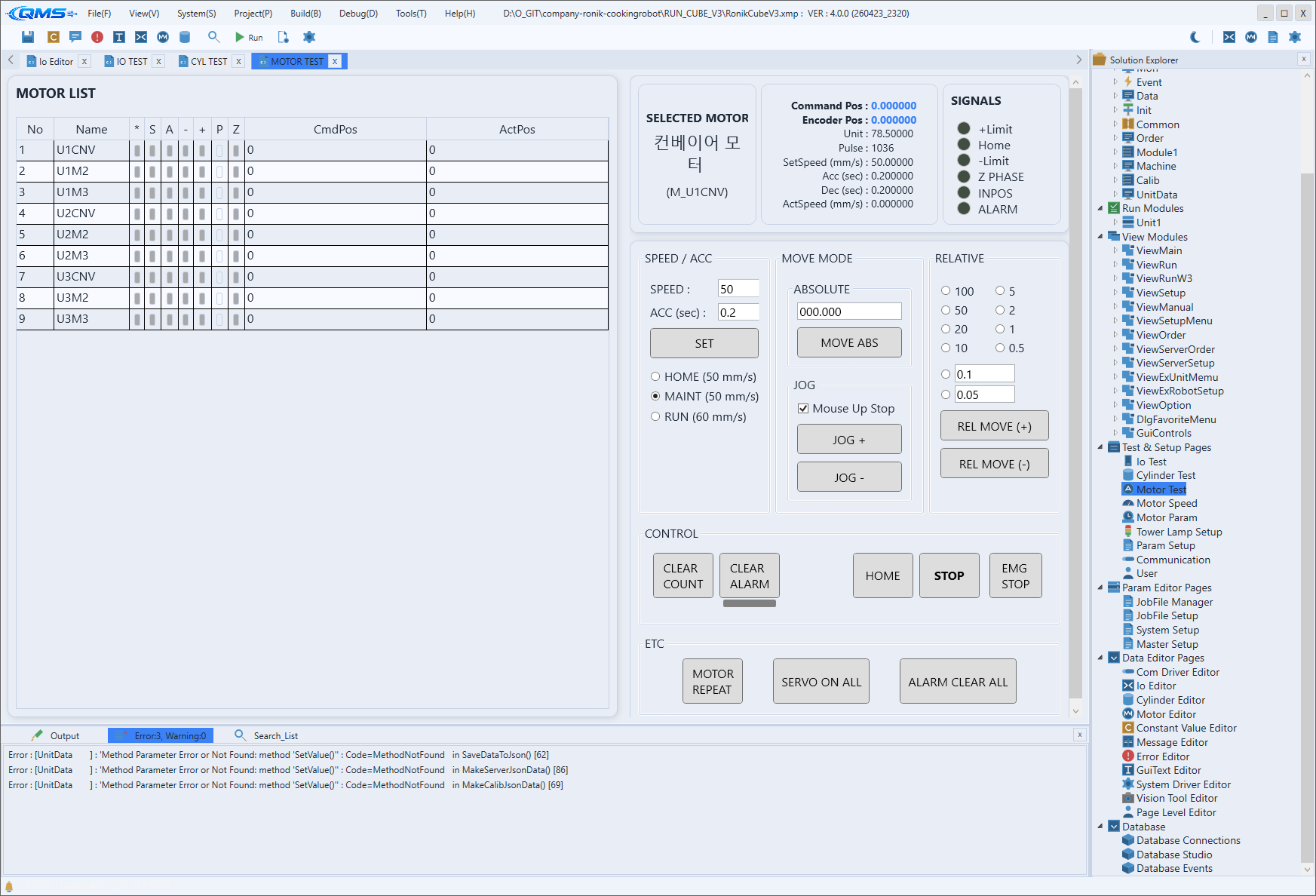
화면은 좌측 모터 리스트와 우측 상세·조작 패널로 나뉩니다.
| 영역 | 설명 |
|---|---|
| MOTOR LIST | 좌측 DataGrid. 축 목록과 함께 In Motion·Home Done·Servo On·Alarm·Limit·In Position·Z Phase 상태 아이콘, CmdPos(지령 위치)·ActPos(실제 위치)를 표시합니다. |
| SELECTED MOTOR | 선택한 축의 이름과 설명을 표시합니다. |
| 위치/속도 요약 | Command Pos·Encoder Pos·Unit·Pulse·설정 속도·Acc·Dec·Act Speed 등 현재 값을 보여 줍니다. |
| SIGNALS | IN MOTION·+Limit·Home·-Limit·Z PHASE·INPOS·ALARM 신호 상태를 표시등으로 나타냅니다. |
| STATUS | 하단 고정 상태줄. 조작 결과(정상/거부/실패)를 메시지로 표시합니다. |
조작 패널
조작 패널은 속도, 이동 모드, 제어, 기타 그룹으로 구성됩니다.
| 그룹 | 기능 |
|---|---|
| SPEED / ACC | SPEED·ACC (sec) 값을 입력하고 SET 으로 적용합니다. HOME·MAINT·RUN 라디오로 미리 정의된 속도 세트를 선택할 수 있습니다. |
| MOVE MODE | ABSOLUTE(목표 좌표 입력 후 MOVE ABS)와 JOG(JOG +·JOG -, Mouse Up Stop 체크 시 버튼에서 손을 떼면 정지)를 제공합니다. |
| RELATIVE | 스텝 크기(100~0.5 또는 사용자 값)를 선택하고 REL MOVE (+)·REL MOVE (-) 로 상대 이동합니다. |
| CONTROL | CLEAR COUNT·CLEAR ALARM·SERVO ON/OFF·HOME·STOP·EMG STOP 버튼이 있습니다. |
| ETC | MOTOR REPEAT(반복 이동), SERVO ON ALL, ALARM CLEAR ALL 을 제공합니다. |
사용 흐름
- System → Motor Test (Ctrl+3) 로 화면을 엽니다.
- MOTOR LIST 에서 테스트할 축을 선택합니다.
SERVO ON/OFF로 서보를 켜고, 필요 시HOME으로 원점복귀합니다.- SPEED / ACC 에서 속도를 설정하고
SET으로 적용합니다. JOG +·JOG -로 미동하거나,MOVE ABS·REL MOVE로 목표 위치로 이동합니다.- 이상 시
STOP또는EMG STOP으로 즉시 정지합니다.