GUI マニュアル · Chapter 20
Motor Test
Motor Test はモーター軸の JOG・移動・原点復帰を直接テストする画面です。軸を JOG で微動させ、絶対/ 相対位置へ移動させ、原点復帰(Home)とサーボ ON/OFF を行うことで、モーターの結線・動作方向・位置決め 精度を確認します。進入経路は System → Motor Test (Ctrl+3) です。
左側のリストで軸を選択すると、右側のパネルにその軸の現在位置と信号状態が表示され、操作パネルで移動を 指示できます。速度プロファイルは Motor Speed、軸パラメーターは Motor Param と Motor Editor で扱います。
JOG・移動・原点復帰ボタンを押すと軸が実際に動きます。接続された装置に対して動作するため、操作前に 軸の移動経路上の安全を確認し、必要に応じて
STOP・EMG STOPボタンで直ちに停止できるよう備えて ください。
主な領域
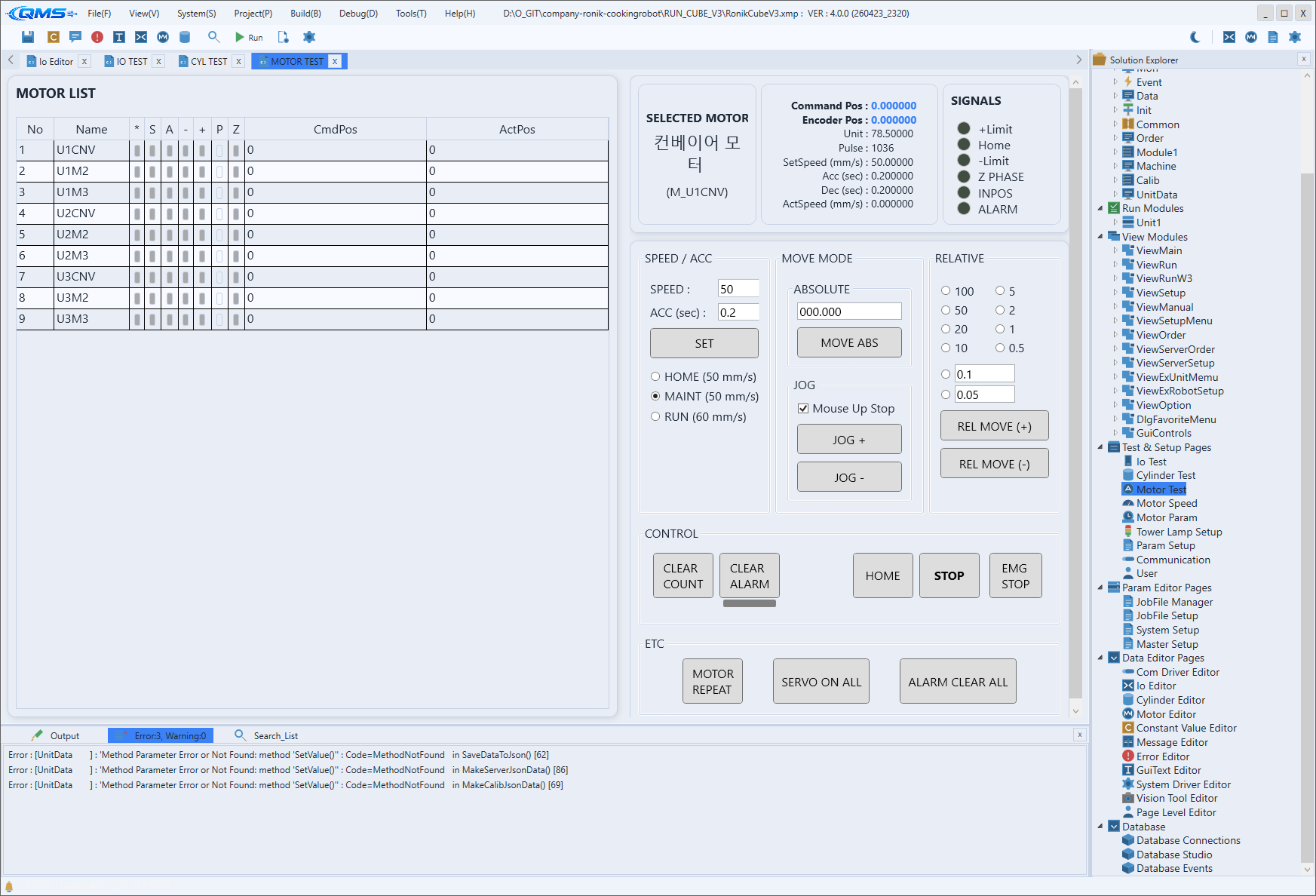
画面は左側のモーターリストと右側の詳細/操作パネルに分かれます。
| 領域 | 説明 |
|---|---|
| MOTOR LIST | 左側の DataGrid。軸リストとともに In Motion・Home Done・Servo On・Alarm・Limit・In Position・Z Phase の状態アイコン、CmdPos(指令位置)・ActPos(実位置)を表示します。 |
| SELECTED MOTOR | 選択した軸の名前と説明を表示します。 |
| 位置/速度サマリー | Command Pos・Encoder Pos・Unit・Pulse・設定速度・Acc・Dec・Act Speed などの現在値を表示します。 |
| SIGNALS | IN MOTION・+Limit・Home・-Limit・Z PHASE・INPOS・ALARM の信号状態をインジケーターで示します。 |
| STATUS | 下部固定のステータスバー。操作結果(正常/拒否/失敗)をメッセージで表示します。 |
操作パネル
操作パネルは速度、移動モード、制御、その他のグループで構成されます。
| グループ | 機能 |
|---|---|
| SPEED / ACC | SPEED・ACC (sec) の値を入力し SET で適用します。HOME・MAINT・RUN のラジオで定義済みの速度セットを選択できます。 |
| MOVE MODE | ABSOLUTE(目標座標を入力後 MOVE ABS)と JOG(JOG +・JOG -、Mouse Up Stop をオンにするとボタンを離した時点で停止)を提供します。 |
| RELATIVE | ステップサイズ(100~0.5 またはユーザー値)を選択し、REL MOVE (+)・REL MOVE (-) で相対移動します。 |
| CONTROL | CLEAR COUNT・CLEAR ALARM・SERVO ON/OFF・HOME・STOP・EMG STOP ボタンがあります。 |
| ETC | MOTOR REPEAT(繰り返し移動)、SERVO ON ALL、ALARM CLEAR ALL を提供します。 |
操作の流れ
- System → Motor Test (Ctrl+3) で画面を開きます。
- MOTOR LIST でテストする軸を選択します。
SERVO ON/OFFでサーボをオンにし、必要に応じてHOMEで原点復帰します。- SPEED / ACC で速度を設定し
SETで適用します。 JOG +・JOG -で微動するか、MOVE ABS・REL MOVEで目標位置へ移動します。- 異常時は
STOPまたはEMG STOPで直ちに停止します。